
LABORATORIO
LABORATORIO TELEMANIPOLAZIONI
Il laboratorio opera nel settore della teleoperazione, telemanipolazione e interfaccia uomo-macchina. Ha come finalità la ricerca e lo sviluppo di telemanipolatori a riflessione di forza da utilizzare in sostituzione dell’uomo in ambienti ad alto rischio.

POTENZIALI UTENTI
Ricercatori e progettisti nel settore della teleoperazione, telemanipolazione e interfaccia uomo-macchina.
DESCRIZIONE
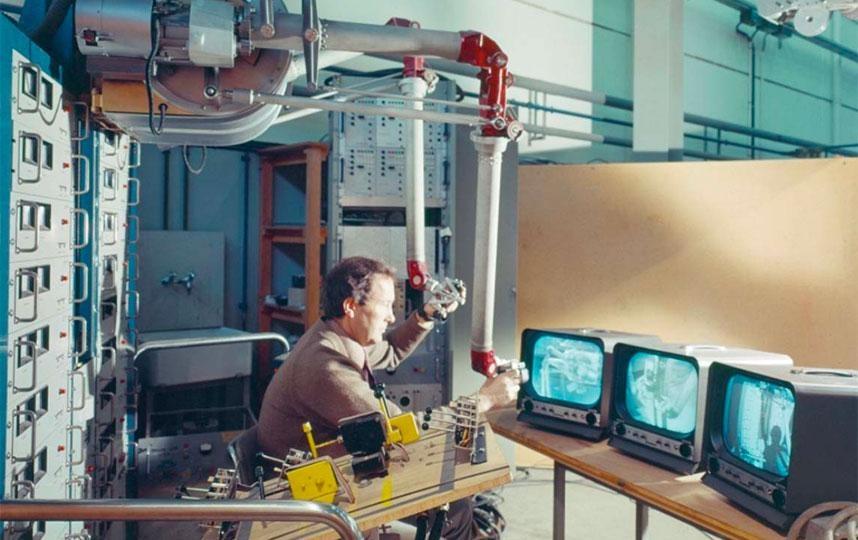
Il laboratorio telemanipolazione è nato agli inizi degli anni 60 con la realizzazione del MASCOT, il primo servo meccanismo ideato e costruito nei laboratori della Casaccia, per essere utilizzato dall’uomo in ambienti contaminati dalle radiazioni. Attualmente vengono condotte attività di ricerca su un nuovo dispositivo di controllo meccanico per compiti di telemanipolazione con ritorno di forza per interagire in ambienti di realtà virtuale.
L’ENEA utilizza il laboratorio per l’attività di due dispositivi:
- MASCOT (MAnipolatore ServoCOntrollato Transistorizzato), dispositivo di tipo “master slave” con retroazione di forza, in grado di effettuare azioni trasmettendo informazioni sensoriali all'operatore. Il MASCOT è stato utilizzato e via via migliorato al JET, dove è tuttora in uso un modello di quarta generazione in grado di compiere tutte le operazioni richieste durante le fasi di shut-down. Con il MASCOT 2000 si è giunti ad una versione completamente rinnovata di questo teleoperatore, che continua ad essere ancora insuperato nelle sue caratteristiche di forza ed è il simbolo delle competenze ENEA nel settore della robotica.
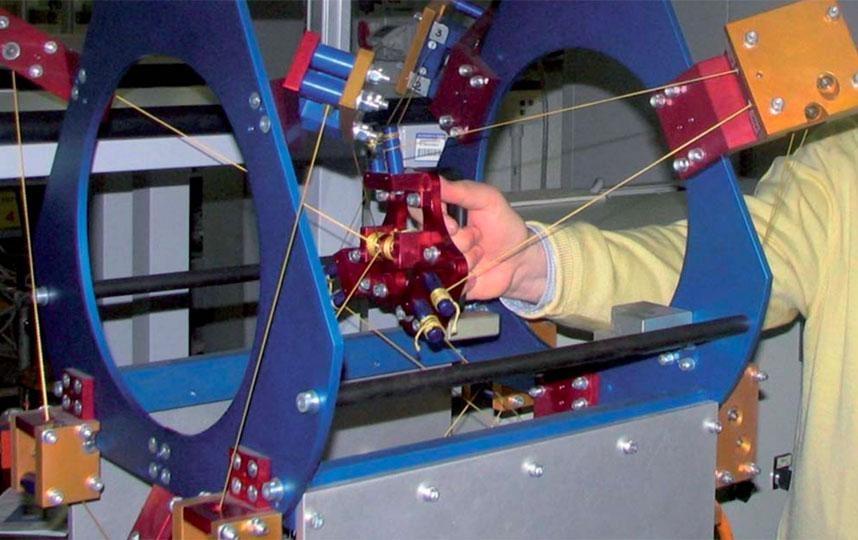
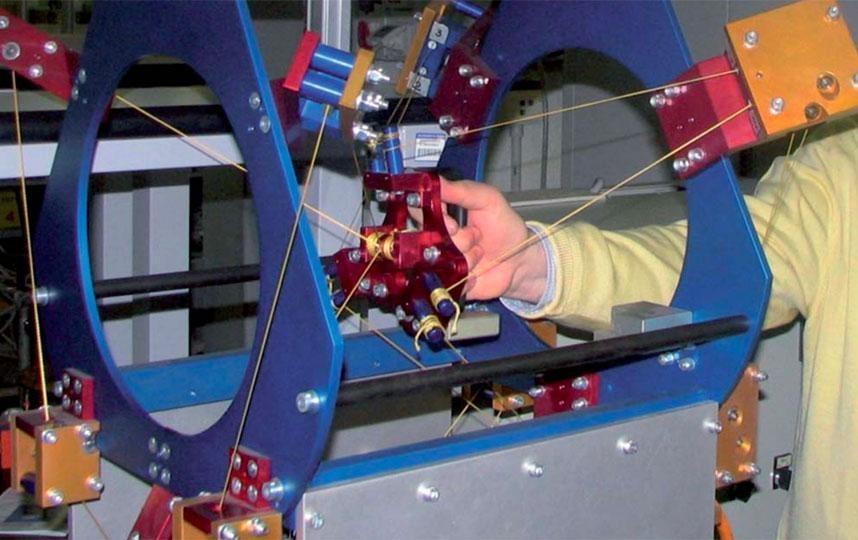
- WiRo 6.3 (Wire Robot), struttura master per teleoperazione a meccanica parallela con sei gradi di libert. realizzato mediante la movimentazione di una piattaforma mobile per mezzo di nove cordini. Recentemente una versione è stata destinata a essere impiegata come piattaforma stabilizzata per il supporto di strumenti di precisione. Progettato e realizzato in collaborazione con il Dipartimento di Meccanica del Politecnico di Torino.
Ultima modifica: 23 Aprile 2019